Smart Construction
ISSN: 2960-2025 (Print)
ISSN: 2960-2033 (Online)
CODEN: SCABAK
CiteScore 2025: 1.5
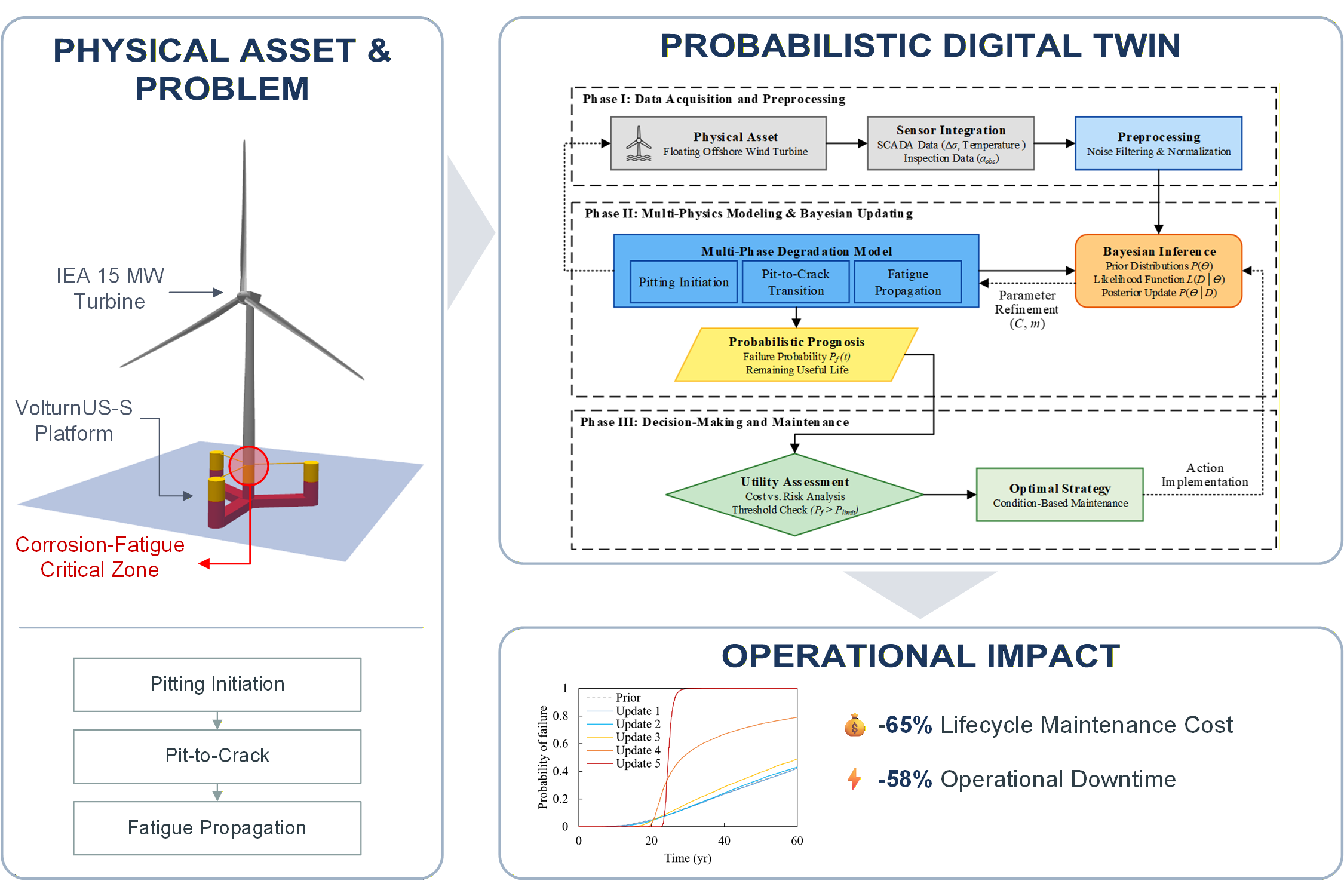
A probabilistic digital twin framework for corrosion-fatigue prognosis of floating offshore wind turbines
Floating offshore wind turbines face growing integrity-management challenges caused by coupled corrosion and fatigue in harsh marine environments. Existing digital-twin frameworks are not yet well suited to combine multi-phase degradation physics with dynamic uncertainty quantification for this problem. To address this gap, this paper proposes a probabilistic digital twin framework that integrates sensor data acquisition, multi-physics simulation, and Bayesian inference for corrosion-fatigue prognosis. A three-phase damage evolution model is formulated to represent the transition from corrosion pitting to short-crack growth and long-crack propagation. Operational observations are assimilated recursively to update fatigue parameters and remaining useful life estimates. The framework is demonstrated using the IEA 15 MW reference wind turbine. The updated model identifies the onset of accelerated crack propagation at year 20 and reduces the 95% remaining-useful-life confidence interval from 40.4 years to 3.4 years. A maintenance strategy based on the updated failure probability reduces operational downtime by 58% and lifecycle cost by approximately 64.9% compared with a fixed-interval strategy. The results indicate that probabilistic updating can support more transparent inspection and maintenance decisions for floating offshore wind turbine structures under corrosion-fatigue degradation.
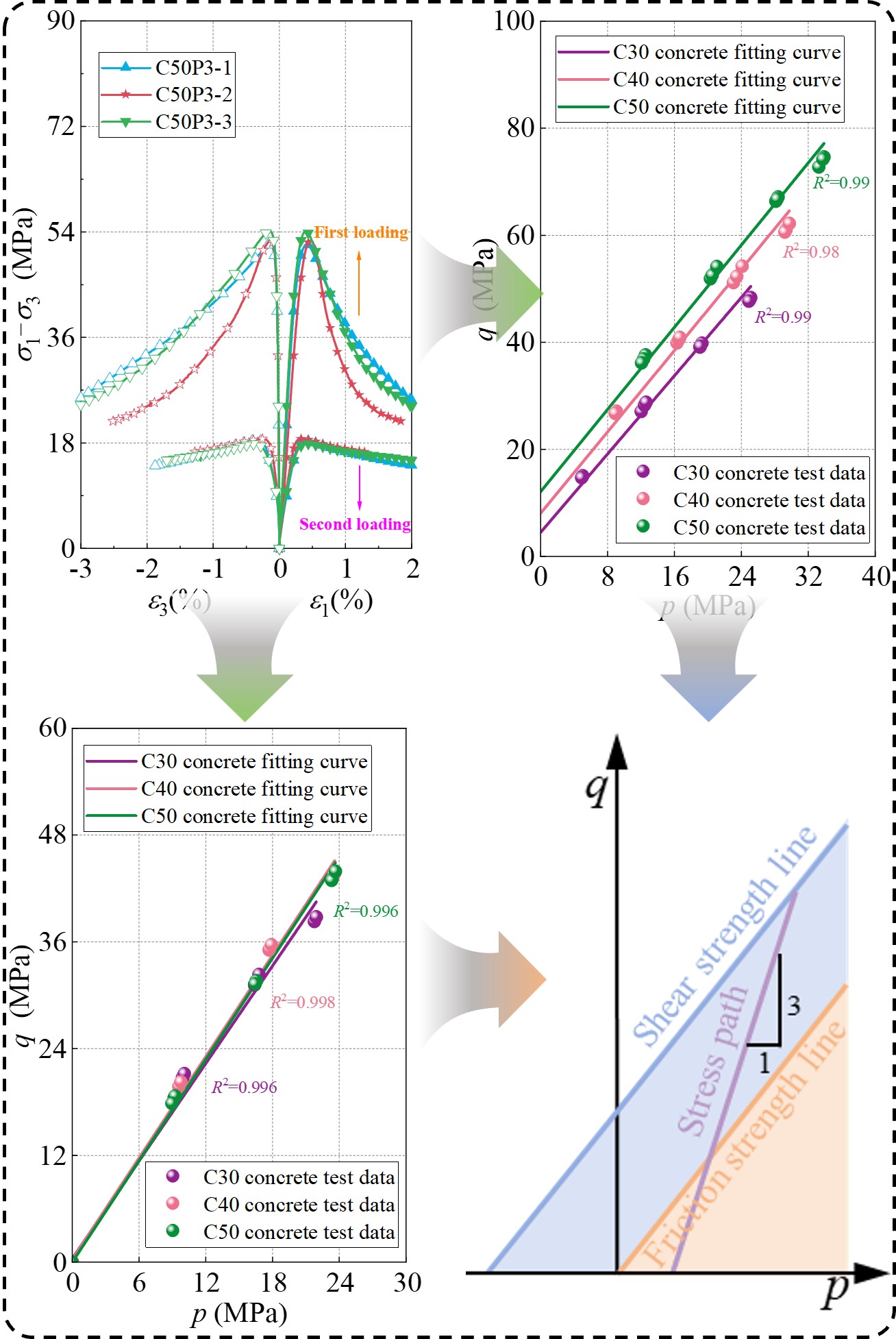
Experimental investigation on cohesion-friction mechanical properties for early-age concrete
As a core material in modern construction, the early-age properties of concrete have a decisive impact on the safety and durability of civil engineering structures. However, systematic research on the mechanical properties of early-age concrete remains limited, particularly regarding the combined influence of cohesive and frictional properties on the material’s macroscopic mechanical behavior, which has not been thoroughly explored. To address this gap, this paper employs a decoupling method for testing the cohesion-friction mechanical properties of concrete, as proposed in previous work. This method successfully separates the cohesive and frictional properties of early-age concrete, validating its applicability under early-age conditions and obtaining typical failure modes following material performance degradation. Furthermore, by analyzing the evolution patterns of cohesive and frictional properties during deformation and strength development, the synergistic mechanism of cohesion-friction mechanical properties in early-age concrete was revealed. The results indicate that the responses of cohesive and frictional properties to hydrostatic pressure in early-age concrete exhibit significant differences. The reduction in macroscopic shear strength and stiffness is fundamentally attributed to the irreversible dissipation of cohesive strength. Ultimately, the mechanical behavior of early-age concrete gradually approaches that of granular materials without cohesion.
A multi-criteria decision framework for selecting preventive maintenance measures on asphalt pavement: a case study of the Liuzhou North Ring Expressway
In recent years, the rapid development and proliferation of highways in China have made asphalt pavement maintenance increasingly complex, requiring maintenance management departments to make practical choices of preventive maintenance measures within limited budgets. To improve comprehensiveness, scientific rigor, and the economy of decision-making, the Analytic Hierarchy Process (AHP) was employed to conduct a decision-optimization study of preventive maintenance measures for asphalt pavements. Taking the preventive maintenance project of the Liuzhou North Ring Expressway in Guangxi as a case study, maintenance measures were initially selected through road condition assessment and investigation. A multi-level, multi-objective decision-making AHP model was constructed, including an objective layer, a criterion layer, an indicator layer, and a scheme layer. By comprehensively considering maintenance needs and assigning values to multi-level factors, the weights and priorities of each maintenance measure were determined. The results show that the ranking and weight calculation of measures such as ultra-thin cover, composite seal coat, micro-surfacing, thin layer cover, and seal coat are relatively rational, and the theoretical analysis results are in good agreement with actual needs.

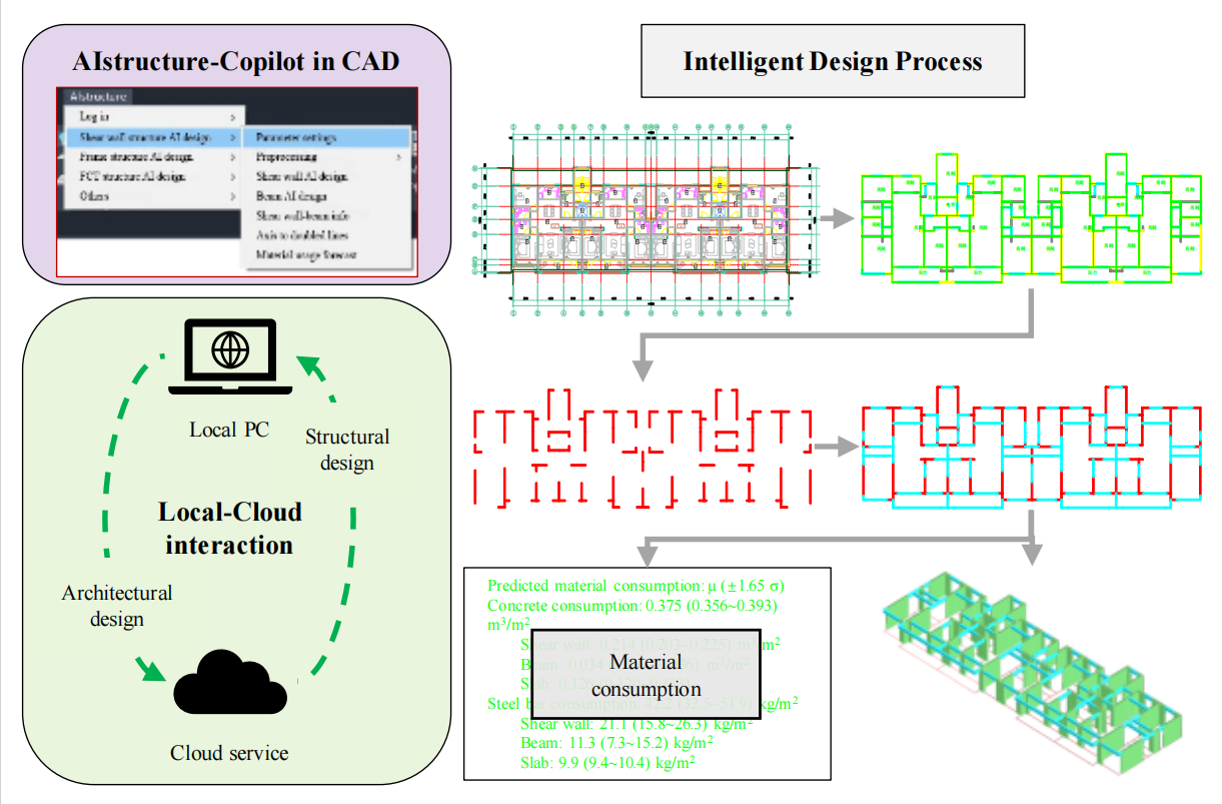
AIstructure-Copilot: assistant for generative AI-driven intelligent design of building structures
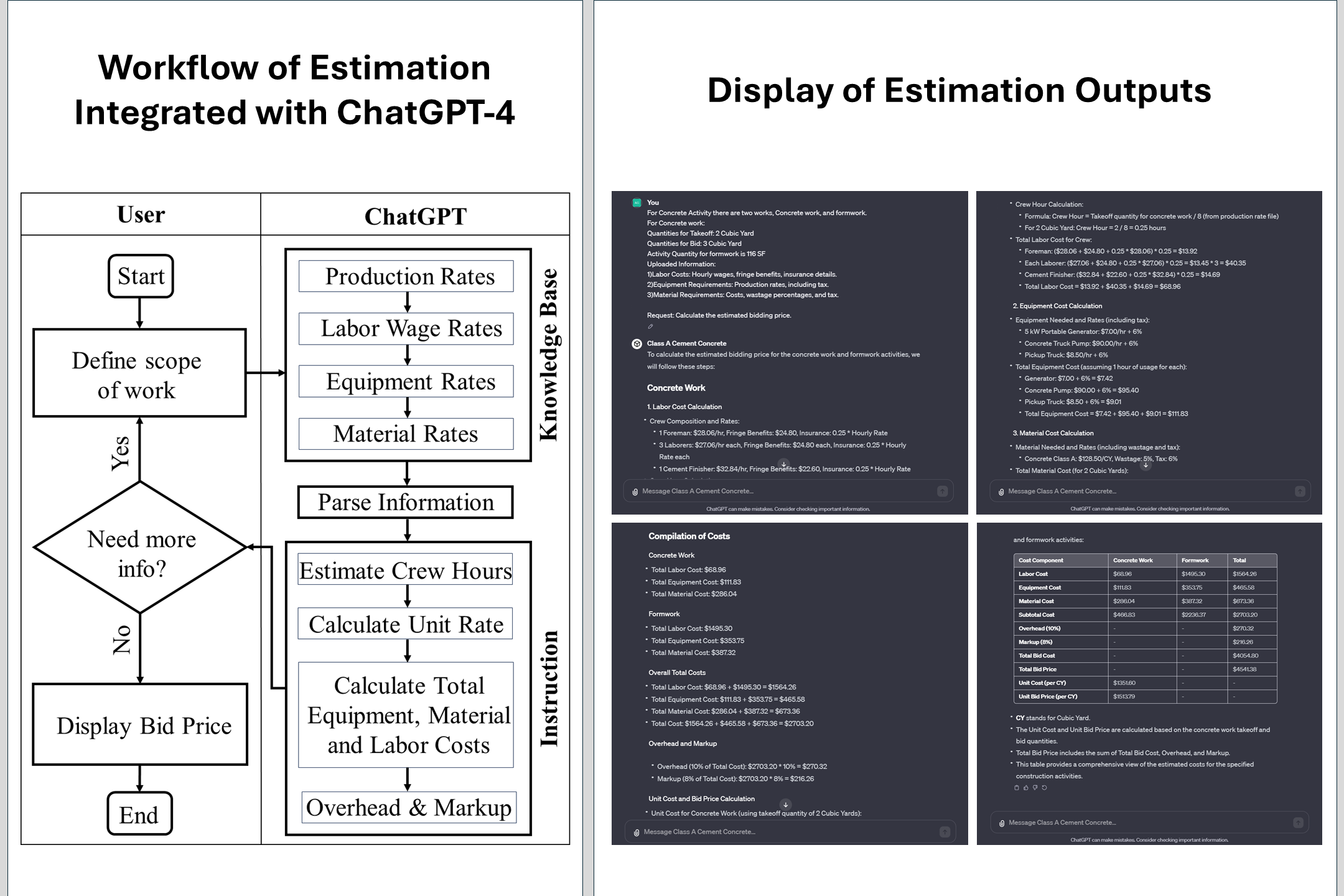
Can ChatGPT assist in cost analysis and bid pricing in construction estimating? A pilot study using a bridge rehabilitation project
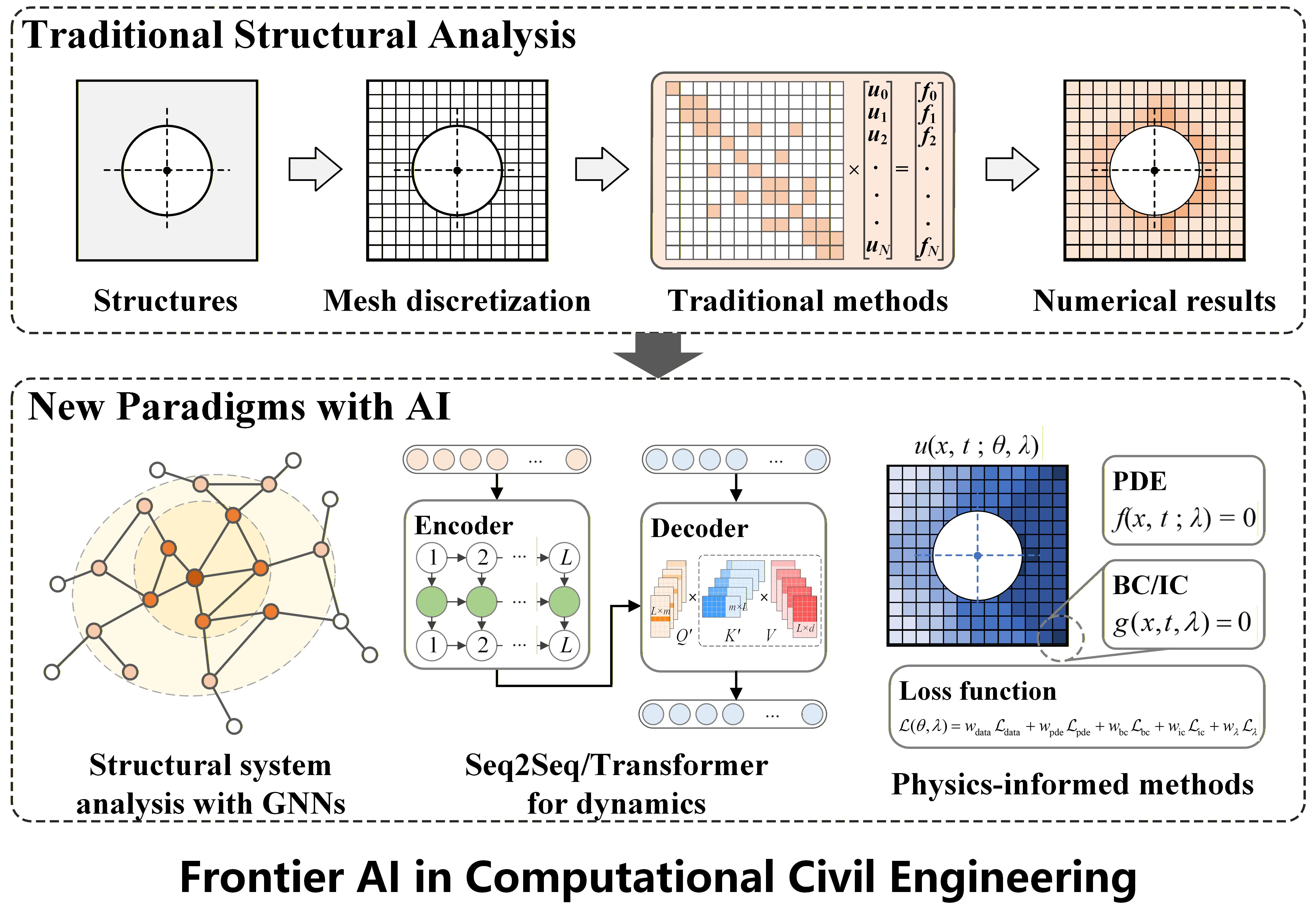
Frontier AI in computational civil engineering: a review of graph, sequence, physics-informed deep learning, and beyond (2020–2025)
Structural computational analysis in civil engineering increasingly demands efficient, robust, and physics-aware methodologies capable of addressing non-Euclidean geometries, history-dependent behaviors, and multi-scale problems that remain challenging for conventional numerical approaches. Recent advances in frontier artificial intelligence (AI) techniques have shown promising potential to overcome these limitations. This paper presents a comprehensive review of frontier AI applications in computational structural analysis from 2020 to 2025, focusing on graph neural networks (GNNs), sequence-to-sequence (Seq2Seq) and Transformer-based architectures, and physics-informed methods. We synthesize fundamental concepts, typical model variants, and representative applications across diverse tasks, including constitutive modeling, static and dynamic structural analysis, data reconstruction, and parameter inversion. Furthermore, we identify critical research gaps and discuss potential future directions within each model family. A quantitative analysis of the reviewed studies is conducted, categorizing them by publication year, application task, and adopted model type. Common challenges regarding benchmarking, empirical–physics trade-offs, scalability and generalizability are summarized. Finally, we highlight several promising techniques for advancing intelligent structural computation and promoting practical engineering deployment.