
 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyAdvances in electroactive polymer-based haptic actuators for human-machine interfaces: from principles to applications
- Volume
- CitationChen Y, Zhang F, Cheng G, Jiao J, Zhang Z. Advances in electroactive polymer-based haptic actuators for human-machine interfaces: from principles to applications. Adv. Manuf. 2025(1):0004, https://doi.org/10.55092/am20250004.
- DOI10.55092/am20250004
- CopyrightCopyright2025 by the authors. Published by ELSP.
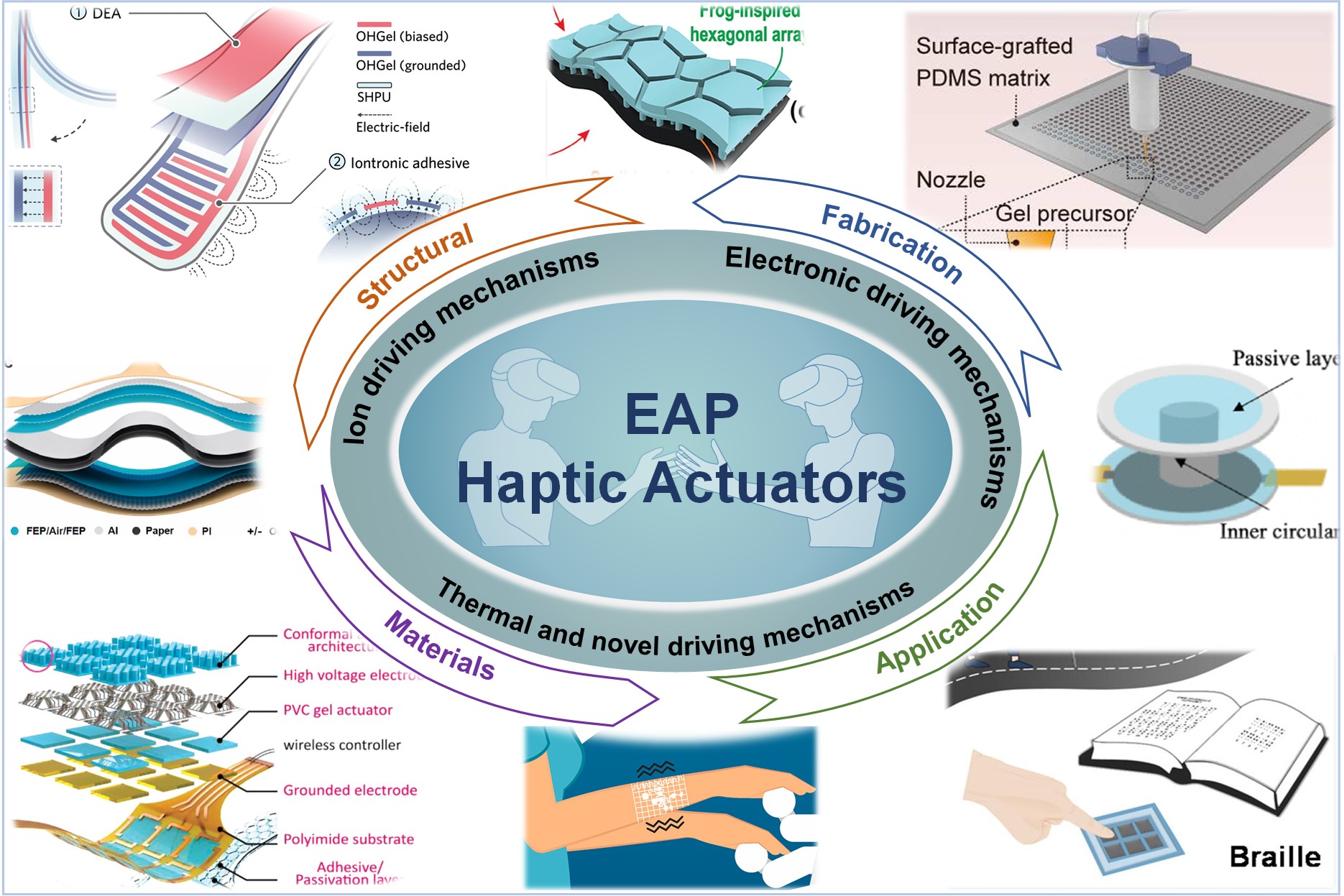
In the context of rapid technological advancement, haptic human-machine interfaces (HMIs) enhance user experience by simulating touch. Electroactive polymers (EAPs) are smart materials with high responsiveness, flexibility, and tunability, making them suitable for haptic actuators and feedback applications. This review examines the role of EAPs in haptic interaction, analyzing driving mechanisms, structural design, functional materials, fabrication methods, and practical applications. We also address challenges like performance limitations and manufacturing complexities, while discussing future trends in material optimization, structural design, and innovative driving strategies. This review serves as a valuable reference for future research and technological advancements in EAPs.
Electroactive polymers; haptic; human-machine interface; actuators
