
 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyFTI-SLAM: federated learning-enhanced thermal-inertial SLAM
- Volume
- CitationLiu H, Zhong H, Si W. FTI-SLAM: federated learning-enhanced thermal-inertial SLAM. Robot Learn. 2024(1):0003, https://doi.org/10.55092/rl20240003.
- DOI10.55092/rl20240003
- CopyrightCopyright2024 by the authors. Published by ELSP.
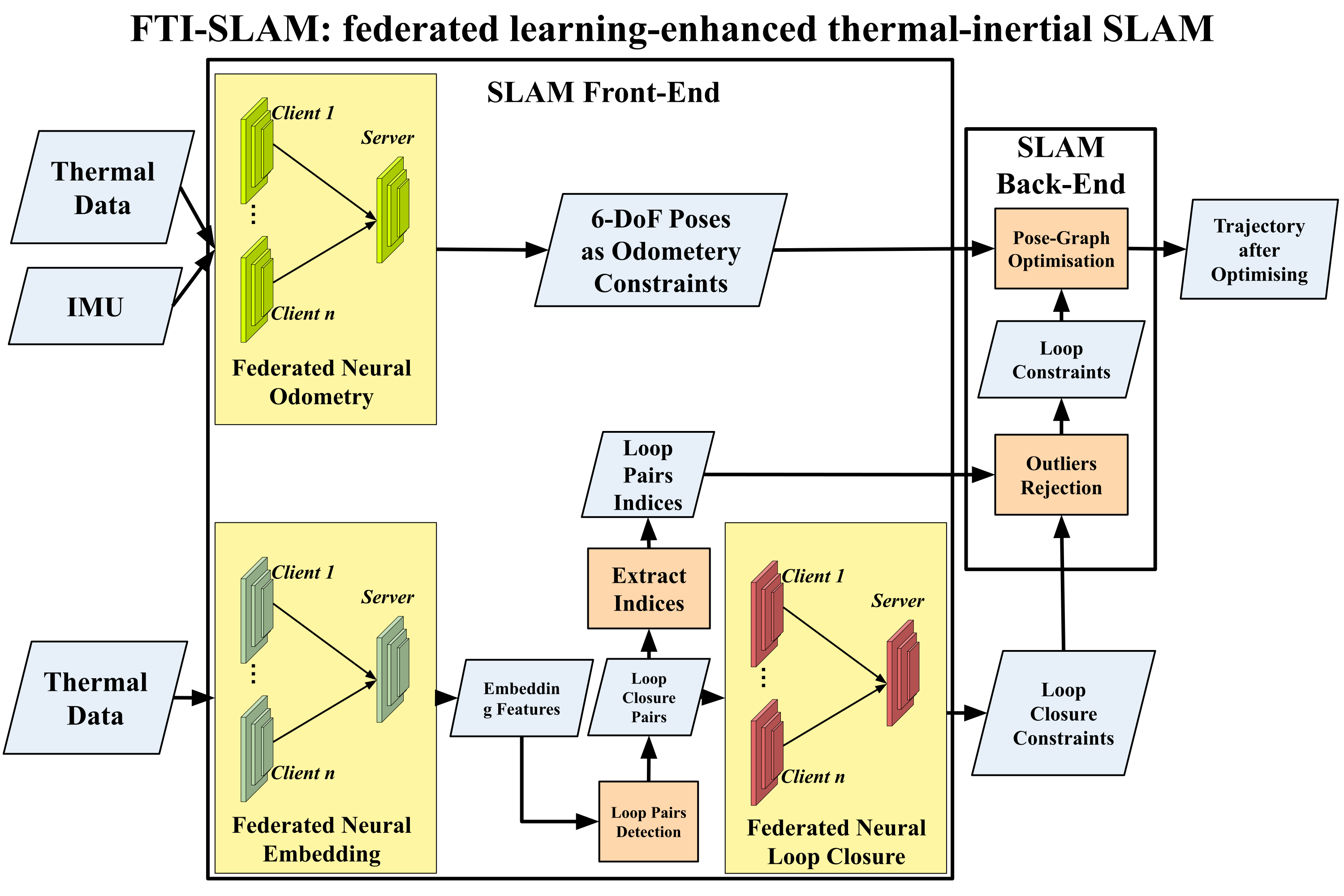
Utilising thermal imaging for simultaneous localisation and mapping has effectively improved the performance and robustness of robots and autonomous systems in unconventional environments. However, the transmission of large amounts of visual data from terminal devices to the central system for training not only results in high communication costs and pressure on bandwidth, but also induces concerns regarding privacy. Meanwhile, for applications in the real world, it is essential to expand the input domain to more practical scenarios rather than relying on experimental environments, and the terminal devices in-service can also benefit from further training with data collected in operations. To deal with these challenges, we investigated FTI-SLAM by applying federated learning to a thermal-inertial simultaneous localisation and mapping system. We conducted a series of experiments and showed that federated learning is feasible for the task and can improve overall performance.
robotics; robot learning; SLAM; distributed artificial intelligence; distributed architectures
